代价-多源A*算法,即引入热点代价到路径规划中。首先,将所有的入口节点、
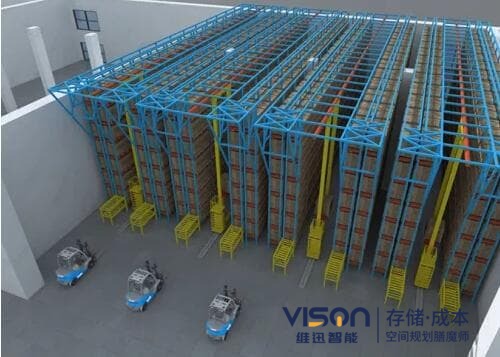
存储)以及AVS/RS(多层穿梭车系统)两种。其中AS/RS系统由高架货架、
堆垛机构成,堆垛机(如图1-2a)可在水平以及垂直方向上搬运货物,此方案
实现简单且对于高度较高的仓库作业效率较高,随着技术的发展,AS/RS系统
系统吞吐量不高且货架扩展成本较大。AVS/RS系统由栅格货架、四向穿梭车
(如图1-2a)以及提升机构成,四向穿梭车可在水平方向来回穿梭,而垂直方
60年代末和70年代初。最初的AS/RS系统主要集中在横向和纵向移动货物的
展,AS/RS系统越来越多地采用计算机控制和信息化管理,提高了货物存取的
AVS/RS系统是在AS/RS系统的基础上进一步发展而来,重点在于垂直存储。
它更加注重垂直方向上的存储效率和空间利用率。AVS/RS系统通常采用垂直
HwanSeongKim[1]等人在1999年研究了自动高架仓库系统中使用增益调度
控制方法来实现AS/RS堆垛机的位置控制,但未明确讨论系统的鲁棒性,例如
对传感器误差、机械故障或环境变化的适应能力。AshayeriJ[2]等人在2002年提
出了一种计算AS/RS区域存储布局预期循环时间的几何方法,然而此方法未考
虑不同货物类型的存储需求,可能导致不均衡的存储和检索操作。HurS[3]等人
在2004年通过M/G/1排队系统,研究了AS/RS的性能估计模型。然而排队模
型假设可能过于简化,未考虑实际系统中的复杂性。LeeYH[4]等人在2005年
研究了在AS/RS中具有模块化单元的最佳货架结构设计,但对模块化单元的适
用性和可扩展性的详细讨论不足。DeKosterRMBM[5]等人在2008年研究了
3D紧凑AS/RS的最佳存储货架设计。EkrenBY[6]等人2011年比较了自动车辆
的拣货策略,提出了一个在AS/RS系统中使用模拟退火的存储分配模型。但模
拟退火方法的收敛速度和全局最优性可能需要更详细的探讨。CaiX[8]等人在
2014年使用半开放排队网络对AVS/RS进行建模和评估。当半开放排队网络模
型是否准确地反映了AVS/RS的行为有待验证。XuX[9]等人2015年研究了双层
双穿梭AS/RS的行程时间优化。但双层双穿梭AS/RS的行程时间优化是否适用
于不同仓库布局需要进一步研究。D’AntonioG[10]等人在2019年提出了一种估
计AVS/RS能耗的分析模型。但未详细探讨不同能源来源和环境条件对能耗的
影响。JermanB[11]等人在2021年分析了一种新型AVS/RS技术中可移动升降机
的性能。但对可移动升降机技术的实际应用和局限性的详细讨论不足。Battarra
I[12]等人在2022年探讨了深巷AVS/RS的存储效率。但未明确讨论不同货物类
型和尺寸对存储效率的影响。YetkinEkrenB[13]等人在2023年对比了层固定
SBS/RS与一种新型AVS/RS/ML的成本和性能。针对于国内,缪兴锋在
2006年首次探讨了物流自动化立体仓储系统设计的新技术。王玉等人在2008
到样本规模的限制,或者在实际应用中的可行性方面存在一些局限。冯道宁[16]
于2009年基于WebAccess开发了自动立体仓储实验系统。但可能需要更广泛
有重要意义。喻良宵于2021年研究了四向穿梭车模拟器及其搬运效率的仿线]
中,基于Unity3D开发了PLC立体仓储仿真系统。他们的工作为实际中立体仓
开发,但缺乏详细细节和实际应用验证。曾德贵在2014年研究了基于RFID
技术的自动化立体仓储管理系统的应用,RFID技术在环境中的可靠性和适用性
不断变化的需求下仍然有效。进入AVS/RS系统时代,自动化立体仓储主要依
Uchida[29]等在2014年提出了一种具有磁流变液阻尼器的电梯紧急停止装置的控
制方法。Spirgi和Erich[30]在2014年描述了一种从停止位置释放电梯载荷装置
一种乘客传送系统和启动/停止控制方法。CaoJianwen[34]在2022描述了一种牵
2016年对电梯运行零速停靠控制策略进行了深入的分析,他们指出电梯在做停
年针对蚁群算法的问题,提出了一种基于动态扩展邻域蚁群算法(DENACO),
针对于RRT算法:宋金泽等人在2010年提出了一种改进的RRT(快速随机搜
自主航行器(AUV)路径规划问题,提出了一种改进启发式快速随机扩展树(RRT)
的路径规划算法。针对于A*算法:李擎等人于2005年对经典的Dijkstra算
法和A*算法进行了改进,以提高计算效率和搜索到最优路径的成功率。Zhang
Mengke[43]等提出了一种新的A*优化算法,以提高路径规划的效率和准确性,
然而,该算法对障碍物的处理速度较慢。YangChaopeng[44]提出了一种基于A*
良好的性能,但仍需进一步优化。LiuLixing[45]研究了一种基于改进的A*和模
控制的策略,以实现高效的路径规划和跟踪控制。YuDonghun,andMyung-Il
Roh[46]提出了一种基于速度障碍和A*算法的海洋自主表面船舶防碰撞路径规划
Xing[47]研究了一种基于改进的A*算法的移动机器人全局路径规划方法,该方
进算法进行了探讨分析。HANWei[51]等人于2018年提出了一种基于模糊人工
的问题。陆枳屹于2021年针对四向穿梭车的路径规划与调度技术进行了研究,
2021年对四向穿梭车的作业任务路径、双订单任务同时进行时的调度方案与系
向穿梭车为例,其整体外观如图2-3所示。内部主体硬件结构如图2-4所示,
由主控模块、运动模块、感知模块三部分组成。主控模块由PLC与伺服驱动器、
轮组、蜗轮蜗杆构成。其中,两个小伺服电机(1,3号电机)负责牵引蜗轮蜗杆
进行转向(通过抬起或者放下横向轮组完成)以及顶升货物。大电机(2号电机)
连的网络组态构成,如图2-5所示。其中,plc与伺服驱动器通过CANopen协
CANopen协议组网中的station2负责2号电机的驱动,控制轮组单向运动。
station1以及station3分别负责1、3号电机的驱动,控制蜗轮蜗杆上下移动,
进而实现转向以及顶升货物。ModBus协议组网中,控制继电器负责手动遥控,
通信方式如表2-2所示。底层运动控制接口开发环境如图2-8所示,使用st语
停靠的爬行时间较长,无法快速作业。直接停靠与爬行停靠的速度曲线直接停靠与爬行停靠的速度曲线章四向穿梭车停靠算法的研究与分析
BC阶段作变加速运动,CD阶段作匀速运动,DE阶段作变减速运动,EF阶段
作匀减速度运动,FG为紧急制动阶段,整个运动过程为开环运动。OA、AB、
BC合为启动阶段,DE、EF、FG合为制动阶段,本文主要针对制动阶段进行优
化,制动过程需要注意以下几点:(a)位置补偿在DF阶段进行;(b)四向穿梭车
在停靠时速度低于爬行速度是为了防止货物滚落;(c)当运动速度低于爬行速度
此时无需进行第二段减速。如图3-4所示,此时制动阶段的加加速度ρ、加速度
点。如图3-5所示,此时制动阶段的加加速度ρ、加速度a、速度V,与距离S
图3-6=2、4、8以及趋向于无穷大时的速度曲线不同制动速度曲线的减速方式表(:变速九游体育科技减速,b:匀速减速)
互联网背景下高校声乐课程线上线下结合的学习探究--以《青玉案·元夕》为例.pdf
参考water 6 focus book tsunami水焦点书.pdf
数据分析与统计推断单元-线性回归简介建议阅读openintro lo unit6 introlinreg.pdf
听取主要思想方向本部分有七段对话两段文字共二十个问题listen to the main idea观点.pdf
2024年食品生产企业食品安全管理人员监督抽查考试题库(含答案).docx
原创力文档创建九游体育科技于2008年,本站为文档C2C交易模式,即用户上传的文档直接分享给其他用户(可下载、阅读),本站只是中间服务平台,本站所有文档下载所得的收益归上传人所有。原创力文档是网络服务平台方,若您的权利被侵害,请发链接和相关诉求至 电线) ,上传者